People
Code
Data
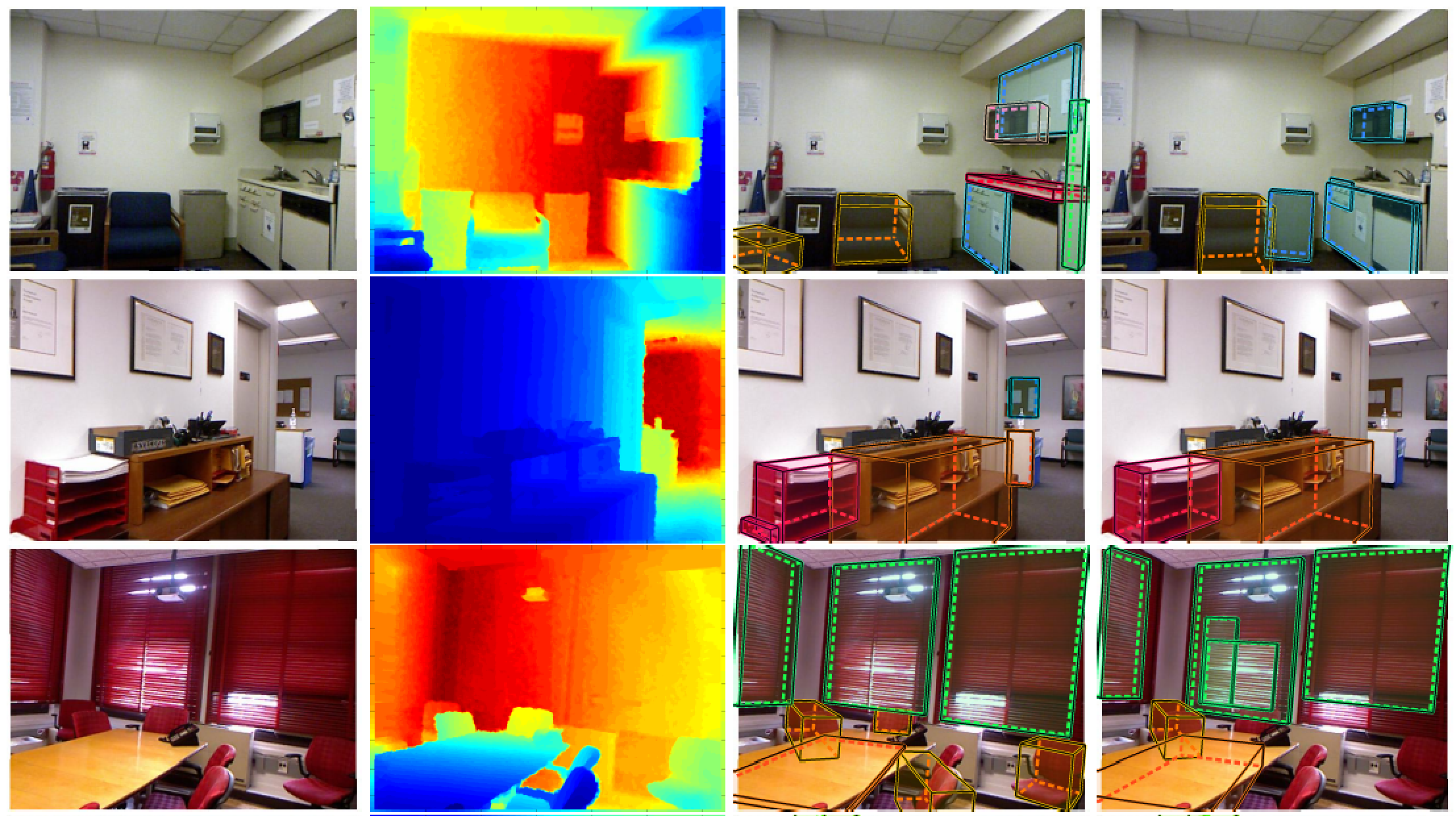
We provide ground-truth data (cubes and their class information), our 3D cuboids and all potentials we used in the model, and our results. To generate our cuboids we used bottom-up regions proposals generated by the extensions of CPMC to 3D. We also provide these candidate regions. Our model reasons whether each candidate cube is correct or not and which class it is.Contact
For questions regarding the code and/or data please contact Dahua Lin and Sanja Fidler.Relevant Publications
The code and data was developed as part of the following publication:Holistic Scene Understanding for 3D Object Detection with RGBD cameras (oral presentation)
To appear at International Conference on Computer Vision (ICCV), Sydney, Australia, December 2013
News
| Feb 14, 2014 | Released the project code. |
| Feb 10, 2014 | Released ground-truth data and detections. |