Trajectory Optimization for Full-Body Movements with Complex Contacts
| Mazen Al Borno1 Martin de Lasa2 Aaron Hertzmann3 |
| 1University of Toronto 2Autodesk Canada 3 University of Toronto and Adobe Systems. |
Abstract
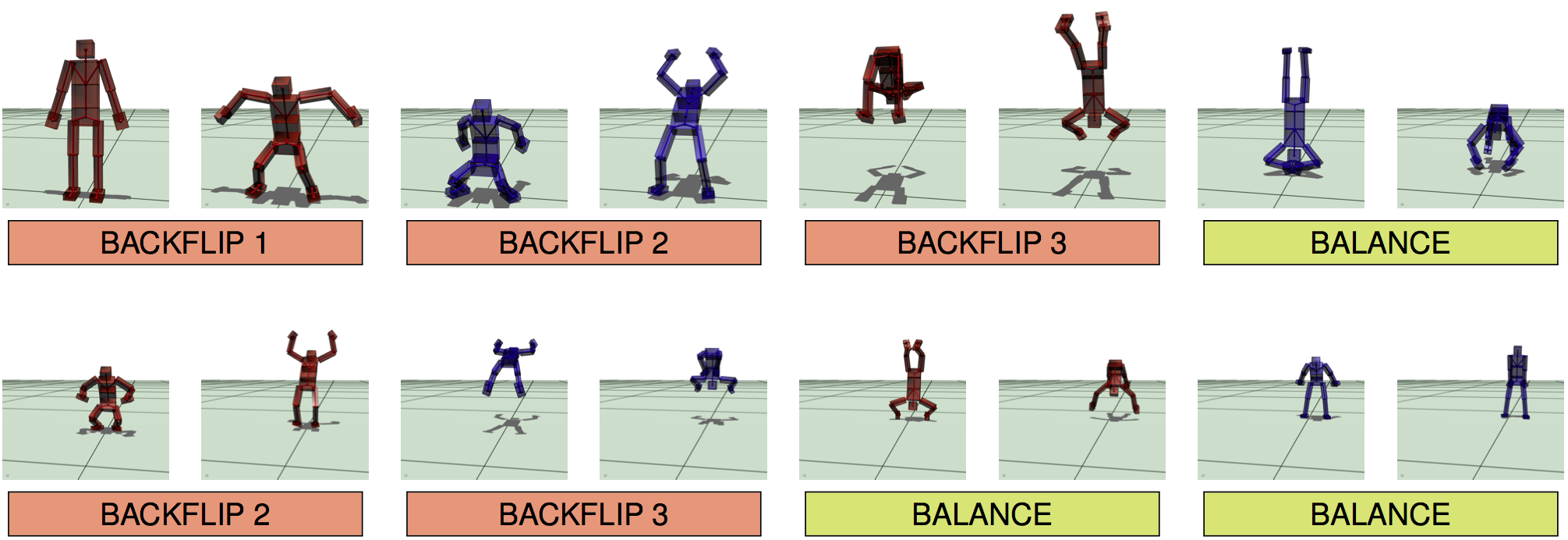
This paper presents the first method for full-body trajectory optimization of physics-based human motion that does not rely on motion capture, specified key-poses, or periodic motion. Optimization is performed using a small set of simple goals, e.g., one hand should be on the ground, or the center-of-mass should be above a particular height. These objectives are applied to short spacetime windows which can be composed to express goals over an entire animation. Specific contact locations needed to achieve objectives are not required by our method. We show that the method can synthesize many different kinds of movement, including walking, hand walking, breakdancing, flips, and crawling. Most of these movements have never been previously synthesized by physics-based methods.